Ziel der Neubau-Aktion: ein Basisgerät, mit Anschlüssen für die Motoren, für die PC-Anbindung, für Endschalter (für eine Montierung mit Tangentialantrieb), Anbindung für einen Fokusiermotor und die Handbox. Da ich nicht vor hatte Astrofotographie zu machen, verzichtete ich auf eine separate Autoguiding Schnittstelle. Desweiteren sollte das Basisgerät einen Echtzeittimer und eine Stromversorgung mit 12V und 5V Versorgungsspannung enthalten und eine Kühlung des Spannungsreglers und der beiden Motortreiber-ICs vorsehen.
Die Handbox sollte mit einem möglichst flexiblen und dünnen Kabel am Basisgerät angeschlossen werden. Sie sollte neben den üblichen Richtungstastern und einem 3-stufigen Geschwindigkeitswahlschalter, auch einen Taster erhalten, mit dem man die Menü-Ebene der Vpower erreichen konnte. Bei der originalen Vpower ist dies nur durch Stellen auf mittlere Geschwindigkeit und gleichzeitigem drücken aller vier Richtungstasten erreichbar. Da man die Display Funktion nur über dieses Menü erreichen kann, wäre das für meine Geschmack zu unkomfortabel geworden. Das Display sollte auch in die Handbox, ebenso ein SD-Karten-Slot und ein Drehregler für den Fokusiermotor.
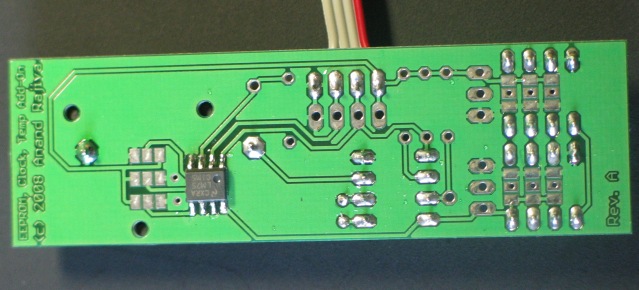
Ein Vpower Basis-Kit (Platine mit MCU) und eine Display-Platine war schnell erworben. Die Bestückung der Vpower habe ich diesmal etwas abgeändert. Der Spannungsregler wurde mit Kabel an die Platine angeschlossen, so dass er später mit dem geplanten Aluminiumgehäuse als Kühlkörper verschraubt werden konnte. Dazu mussten alle Bauteile, die höher als die gesockelten ICs waren, auf die Platinenunterseite verlegt werden. Im Wesentlichen waren das die Elektrolykondensatoren und aufrecht zu bestückende Widerstände. Auf die ICs sollte ein durchgängiger Rippenkühlkörper mit Wärmeleit-Pads aufgeklebt werden.




Im geöffneten Handbox-Gehäuse rechts zu sehen, ist das Display, unterhalb davon der SD-Card Slot und am Ende des Flachbandkabels eine Schnittstelle, die zum evtl. Update der Display-Firmware benötigt wird.
Das Gehäuse selbst war etwas zu flach, so dass innen etwas ausgefräst werden musste, damit das Display genug Platz fand.




Auf einem Steckbrett wurde noch der Quarzoszillator angeschaltet und die Verbindung zwischen Breakout-Board und Programmer hergestellt.




Daher musste ich an der Gehäuserückseite einen entsprechenden Ausschnitt anbringen und einen Deckel aufkleben (in der Seitenansicht mit SD-Slot erkennbar). Ich habe dazu einen etwas weicheren Kunststoff genutzt. So dient der Deckel auch noch als Puffer beim Ablegen des Gehäuses.

Die modifizierte Vpower-Platine habe ich auf Abstandhaltern so montiert, dass die (hier blauen) Trimmer zur Motorstromeinstellung vor entsprechenden Löchern im Gehäuse platziert werden konnten. Der Spannungsregler wurder mit dem Gehäuse verschraubt.
Das Kabel links enthält Abgriffe an den Enable-Pins der Motor-Treiber. Über eine kleine Zusatzschaltung mit 2 MOSFET können Endschalter eines Tangentialantriebs die Motoren ausschalten.

Im Grunde kann auf diese Platine verzichtet werden, und den DS1307 Chip werde ich bei Gelegenheit in der Handbox unterbringen.

Links oben befindet sich der Sicherungshalter, um die Spannungsversorgung vor Kurzschluss und Überlast zu schützen. Ich schließe das Gerät an einen 12V 7Ah Bleigel-Akku an, dessen Ladung für mehrere Beobachtungsnächte ausreicht.
Rechts befinden sich 2 9-polige D-Sub Buchsen zum Anschluss der RA- und DEC-Schrittmotoren und eine Schalterleiste, an der z.B. die Drehrichtung für Nord-/Sübhalbkugel eingestellt werden kann.
Unten in der Mitte ist ein D-Sub Stecker mit den Endschaltereingängen, schaltbaren Spannungen und Fokusiermotoranschluss belegt.

Der rote Drucktaster links schaltet das Gerät ein, die LED darunter zeigt Betriebsbereitschaft an. Der Drucktaster daneben schaltet die rückwärtig herausgeführten Spannungen an. Damit kann z.B. eine LED-Beleuchtung betrieben werden.
Die beiden roten LEDs zeigen an, wenn ein Endschalter auslöst. Hat man die Stellung des Tangentialantriebs angepasst, kann man die Auslösung mit dem blauen Taster wieder aufheben.
Links unten ist die PC-Schnittstelle. Hier könnte über ein Breakout-Kabel auch ein ST-4 kompatibler Autoguider angeschlossen werden. Rechts ist der Anschluss für die Handbox.
Das Endergebnis:

Ein Foto vom Innenleben des Basisgerätes habe ich bewusst weggelassen. Durch die vielen Schnittstellen und die damit verbundene Verkabelung, war ich froh, als das Gehäuse geschlossen war ;-)